
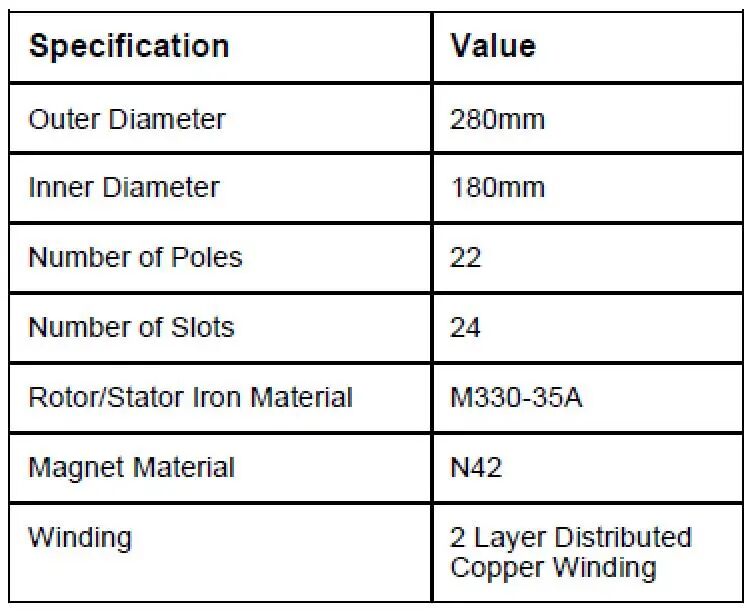
摘要
在城市空中交通及客运支持应用中,电动垂直起降飞行器eVTOL预计将在屋顶或其他场地垂直起降。本研究使用FlightLab与GT-SUITE耦合仿真,建立了基于物理的详细电推进系统模型,并特别考虑城市湍流尾流环境,展示了对此类飞行器的一次设计迭代。研究旨在探讨详细飞行器仿真能否在设计阶段早期识别关键系统需求,并最终帮助聚焦和加速开发进程。仿真工具专门应用于城市湍流尾流环境中的进近与悬停保持机动,以支持飞控和电推进系统设计。通过模拟单个电机故障案例,确定了电推进系统组件设计与尺寸以及飞行控制器的设计要求。研究最后列出了后续设计迭代的待办事项清单。
1.简介
先前的研究(参考文献1, 2, 3)已探索了将垂直起降飞行器eVTOL建模与基于物理的电推进模型仿真耦合在统一的仿真框架中的可行性。结果表明,耦合eVTOL仿真的设置时间和数据要求是可管理的,并且可以用于飞行器概念设计阶段。耦合仿真揭示了飞行机动过程中系统的耦合特性,这些特性无法通过独立的仿真获得。参考文献1阐述了在湍流运行环境下,耦合飞行动力学与详细电推进仿真的优势。
本文的目的是在eVTOL飞机设计迭代步骤的早期阶段进行耦合的、基于物理的仿真。假定存在一个商业案例,证明在营利应用中开发和运行一个新的飞机系统是合理的。飞行器设计任务可从该商业案例推导得出。现有及新兴的垂直起降建模与仿真工具及技术可为早期设计阶段提供支持,助力推导飞行器及系统级需求,从而推进具有竞争力且加速的服役时间计划。此外,早期采用仿真技术直接支持当前适航当局、欧洲“洁净天空2”计划下的“旋翼机仿真验证”项目(参考文献4)以及SAE G-35工作组正在探索的仿真辅助飞行器认证方法。
本文利用参考文献1中建立的模型,将耦合仿真环境应用于一种“升力+巡航”构型电动垂直起降飞行器的概念设计阶段迭代。图1展示了本文遵循的飞行器设计流程,重点关注飞行动力学与电推进系统的建模与仿真。研究采用概念性设计任务对电推进系统进行初步尺寸确定,通过综合飞行器仿真与分析,生成设计任务所需功率的初步预测数据。该信息将用于确定电推进系统主要部件的尺寸、设计热管理系统并明确储能需求。设计任务包含从屋顶垂直起降场起降的操作,因此要求飞行器具备在湍流尾流环境中进近、离场与着陆的能力。对湍流城市空气环境下进场着陆的关键机动飞行操作进行了飞行动力学与电力推进系统的耦合仿真。湍流空气尾流环境预计会对飞机的飞行控制和电力推进系统造成压力,因此除了设计任务所需的稳态功率估计外,还可能推导出重要的设计要求。此外,为向飞行器系统设计提供参考依据,还专门执行了单升力旋翼故障工况的模拟。因此,依据图1所示流程进行分析,可获得稳态与瞬态功率需求,这些数据将用于电力推进系统的规格确定与飞行控制器的设计。通过对电力推进系统进行精细化建模与仿真,可初步获得各部件质量参数,为下一轮设计迭代中飞行器整体设计的优化提供关键输入。
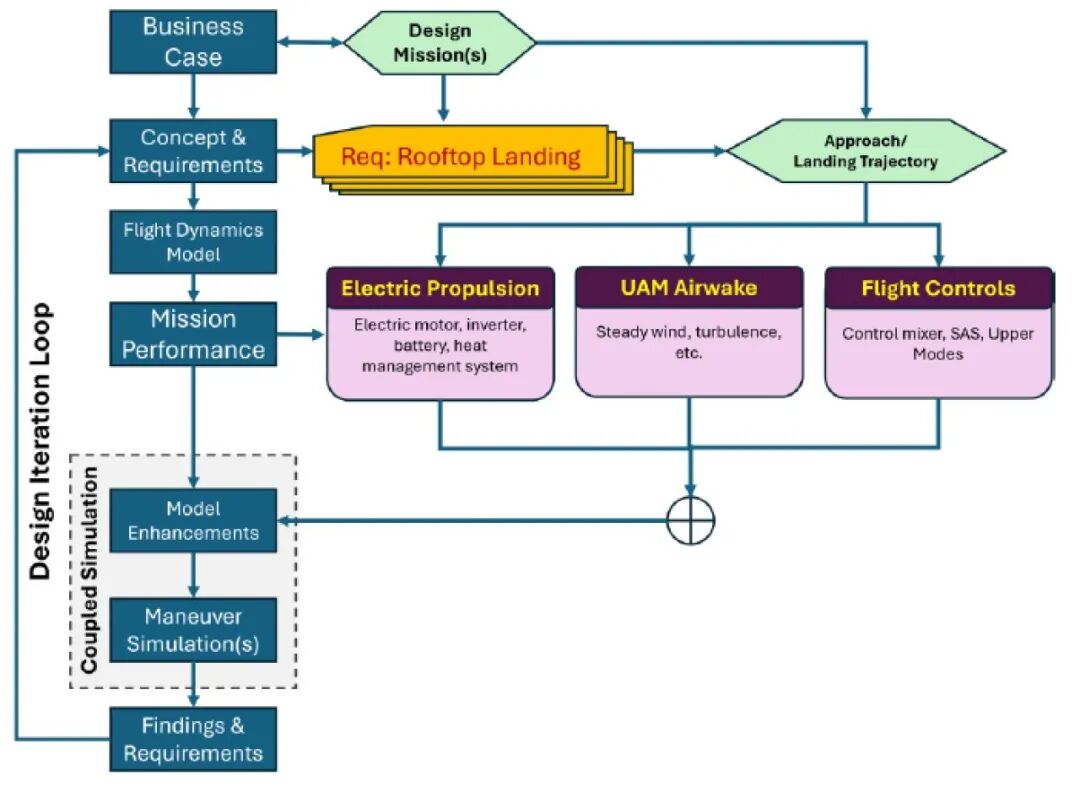
图1 飞机设计迭代图解
研究最终列出了后续飞机设计迭代的步骤。需要指出的是,该方法适用于针对特定设计任务,研究候选电动垂直起降(eVTOL)构型。由于不同飞机构型的研究流程预计相似,本研究未对此展开讨论。
2.初始飞机设计和模型
本研究采用的仿真模型参考了NASA“升力+巡航”型eVTOL概念设计(见参考文献5、6)。该仿真可以用于早期飞机设计的多个层面,包括顶层飞机与系统需求、子系统设计与规格确定,以及飞机子系统重量估算。本文讨论基于一个前提:在先前构型筛选阶段,“升力+巡航”构型已被判定为最符合任务需求。需注意,下文命名方式遵循气动系统的主要功能逻辑,即旋翼(rotors)负责垂直升力,螺旋桨(propellers)负责前向推进。
2.1升力+巡航eVTOL配置
基于参考文献5、6,本研究采用FLIGHTLAB软件构建了“升力+巡航”型电动垂直起降飞行器(eVTOL)的刚体飞行动力学模型(FDM),如图2所示。该构型包含八个刚性叶片升力旋翼,分别安装在机翼盒段前后延伸的支柱上。升力旋翼采用双叶片设计,半径为5英尺,叶片具有约10度的线性扭转角。
旋翼/螺旋桨的入流与尾流采用Peters-He有限状态模型进行建模。三叶推进式螺旋桨(半径约4.5英尺)的建模方式与升力旋翼类似。为简化模型并避免变转速控制可能导致的显著时间延迟,本研究中升力旋翼与推进螺旋桨均采用恒转速、可变总距桨叶控制的建模方式。升力旋翼与推进螺旋桨的转速分别设定为907转/分与1050转/分。刚性主翼展长约为48英尺,采用概念性通用航空翼型。飞行器总重为5800磅。该构型包含机身气动载荷模型,其气动系数通过查表方式以概念性数据表示。机身的等效平板阻力预算设定为0.155平方米(1.67平方英尺)。垂直尾翼与水平尾翼作为二维气动面进行建模,采用对称翼型的气动系数。尽管仿真模型中包含起落架模块,但本次研究未模拟地面接触效应。为实现飞行动力学模型在有无湍流尾流条件下的基准仿真,研究采用了理想发动机模型。该模型通过提供维持恒定转速所需的旋翼/螺旋桨扭矩来支持仿真,且未对动力传动系统的动态特性进行建模。在飞行控制系统(包括控制混合器、增稳装置与自动驾驶仪)的开发过程中,同样使用了此理想发动机模型。

图2 参考文献5,6中的升力+巡航 eVTOL配置示例
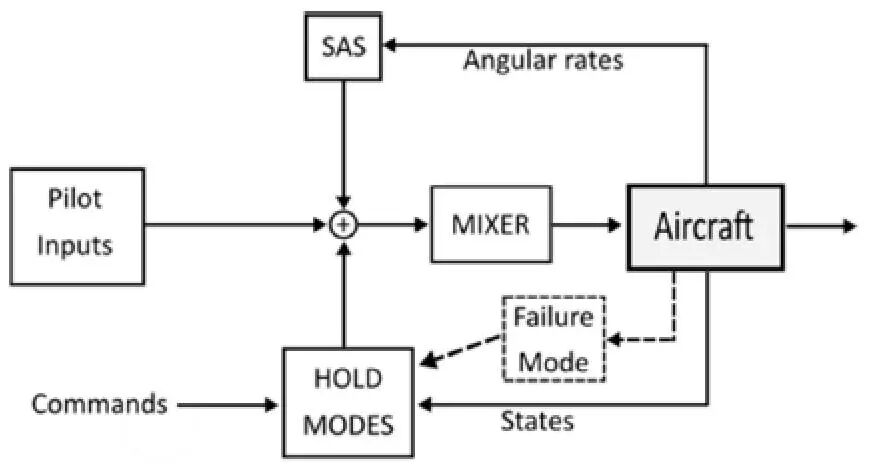
本研究采用的飞行控制系统架构如图3所示。该系统通过FLIGHTLAB控制系统图形编辑器实现,并作为耦合仿真中飞行动力学模型的一部分。飞行控制模型包含经典驾驶杆操纵(即纵向、横向、总距及脚蹬控制)、增稳系统(SAS),以及能够根据预设轨迹指令生成飞行控制输入的保持模式控制器。针对“升力+巡航”型电动垂直起降飞行器(eVTOL)构型,控制混合器将操纵指令分配至各升力旋翼与推进螺旋桨。本研究重点考察等效空速低于40节(约74公里/小时)的工况,该速度范围内固定翼控制面基本失效。飞行器俯仰控制通过前后升力旋翼的差动推力实现,横滚控制依靠左右升力旋翼的差动推力,偏航控制则结合了倾斜升力螺旋桨的差动扭矩与推力共同完成。位于水平安定面后方的推进式螺旋桨通过功率控制指令提供前向推力。升力旋翼与推进螺旋桨的推力通过调节桨叶总距实现控制,同时保持其转速恒定。
图
3 “升力+巡航”型电动垂直起降飞行器(eVTOL)飞行控制系统示意图增稳系统在提升各类飞行器(尤其是旋翼机)的稳定性和操控性方面发挥着至关重要的作用。该系统通过传感器持续监测飞行器的姿态与运动状态,并实时调整以抵消干扰,保持期望的飞行特性。增稳系统通常采用先进算法与执行机构,以提供快速精准的修正,确保飞行器在湍流等外部扰动条件下保持稳定。通过对气动面或推进系统进行主动管理,增稳系统显著提升了飞行器的整体安全性与性能,使其能够以更高的可靠性在复杂环境中飞行。本研究通过引入飞行器角速率(即滚转、俯仰和偏航)的反馈机制,有效增强了飞机的稳定性。
图3中的保持模式控制器在纵向与横向通道上设有两大主要模式:速度保持模式与位置保持模式。两种模式均以“目标”速度指令作为输入。速度保持模式直接将速度指令作为目标速度,而位置保持模式则将位置误差转换为目标速度。基于目标水平(x-y)速度指令,系统计算速度误差并通过PID控制器实现指令跟踪。该保持模式控制器还通过总距通道提供雷达高度保持功能,并利用偏航控制通道实现航向保持。增稳系统与保持模式控制器均基于理想电推进模型,在稳态风条件下完成开发与参数整定。为进一步适应本文所采用的城市空气尾流环境,飞行控制器经过额外调参,实现了在稳态下降与着陆点上空悬停保持状态下的仿真验证。
本飞行控制器未包含故障缓解算法(例如失效模式控制器),这与本研究讨论所基于的设计成熟度假设相符。故障被注入目标升力螺旋桨,并在机翼另一侧的对称升力螺旋桨上同步模拟。飞行控制器在故障条件下以尽力维持飞行为目标。基于飞行器的响应特性,研究得出了下一代飞行控制设计的新需求。后续需设计失效模式控制算法,通过调整保持模式控制器的参数以实现故障检测与修正。此类系统可采用数据驱动方法,通过输入输出数据检测故障,并进行系统重构以维持期望的飞行性能。
2.2 设计任务
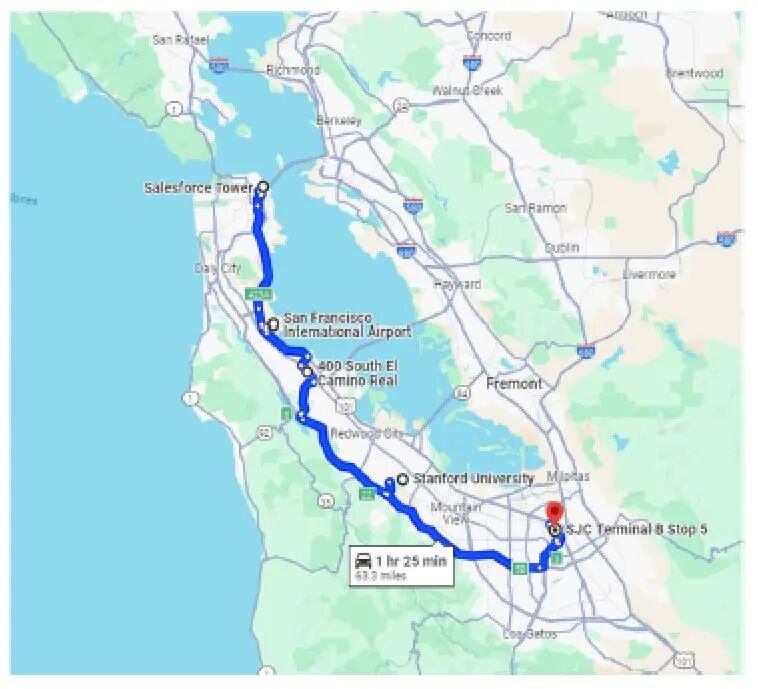
该“商业案例”旨在提供一种按计划运行的空中交通解决方案,为最多六名乘客提供往返于旧金山和圣何塞市中心的服务,中途停靠两座国际机场(旧金山国际机场和圣何塞国际机场)以及硅谷的科技中心。旧金山与圣何塞之间的距离约为67公里(42英里),驾车耗时约1至1.5小时(视交通状况而定)。需要说明的是,本研究并未聚焦于开发城市空中交通的实际商业案例。
为演示飞机设计流程而构建的简化设计任务如图4所示。该任务包含六个航段,模拟从加利福尼亚州旧金山市区飞往圣何塞的完整航线。每个任务航段涵盖悬停、垂直爬升/前飞爬升、巡航飞行及下降等任务要素。飞行高度设定未考虑空域管制要求,巡航阶段在距地面约1000-1500英尺高度进行。每个航段均以60秒悬停作为起始与结束环节。尽管环境条件变化对飞机设计至关重要,但本研究聚焦于标准大气条件下的分析,探索非常规大气条件(如环境温度升高)下的飞行与任务性能时可采用相同工作流程。需补充说明的是,为完善该“商业案例”,可假设类似的任务剖面将继续沿东湾区域执行,最终使飞机经停奥克兰国际机场(OAK)后返回旧金山原始垂直起降场。
图
4 设计任务示例2.3 设计任务-性能
如图5所示,本研究采用FLIGHTLAB任务计算器,通过选取可用任务元素清单中的模块来构建设计任务。该计算器随后利用前文所述的“升力+巡航”型eVTOL仿真模型执行任务剖面。图4所示的设计任务表明,任务始于旧金山市中心某建筑顶部的垂直起降场。在完成起飞检查(悬停)后,飞行器爬升至巡航高度,随后下降飞向下一个着陆点。用户需在任务计算器中为每个任务元素(悬停、爬升、巡航、下降等)设定初始飞行条件与环境参数。飞行器首先完成配平操作,并在执行下一任务单元前采集飞行性能参数。任务完成后,计算器将整合全任务的飞行时长、所需功率及能耗数据。由此可获得各任务单元所需的稳态功率、飞行时间与能量消耗值。由于FLIGHTLAB中的初始任务性能仿真采用理想发动机推进模型,未考虑传动损耗与部件效率影响。任务性能评估结果被提交至电推进系统设计组,用于确定电推进系统的规格与设计,其中包含任务计算器估算的完整设计任务能量消耗预测值。该数据结合单次充电可执行的任务数量,可用于确定飞行器电池的容量规格。
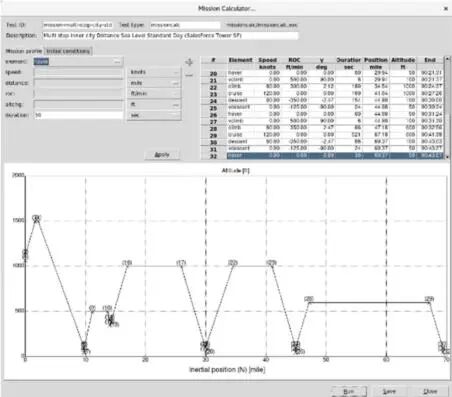
图5 FLIGHTLAB任务计算器
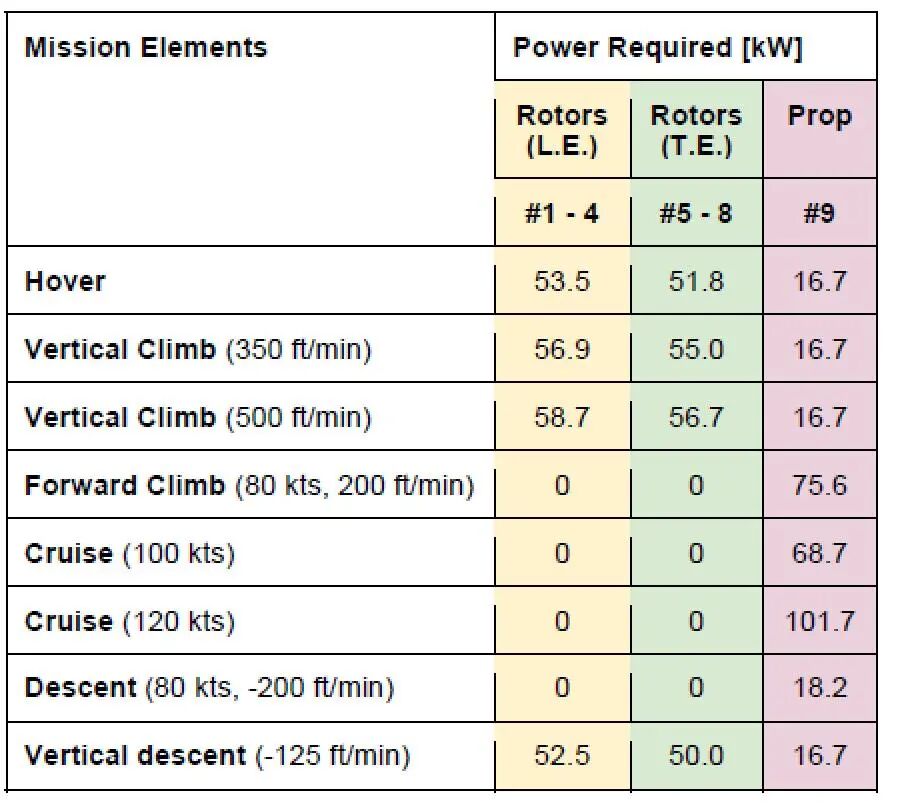
表1汇总了各任务单元中升力旋翼与推进螺旋桨所需的稳态功率估算值。需注意,配平解具有对称性,即在特定任务单元下,前缘升力旋翼(编号1-4)与后缘升力旋翼(编号5-8)的功率需求相同。因此,表中仅显示每组中单个旋翼的结果数据。
表1 各任务单元所需功率
2.4 电力推进系统概念设计
电力推进系统的初步布局如图6所示。电池及其热管理系统被布置在靠近飞机目标重心的机翼/机身结构内。每个旋翼和螺旋桨均配备独立的电动机、逆变器和换热器模型。基于参考文献[1]的推进系统进行了扩展,新增了详细的逆变器模型、针对升力旋翼和推进螺旋桨的新型电机设计,以及电机精细化热管理模型。

图
6 电力推进系统示意图电动机需设计为能够同时满足设计任务所需的稳态功率及支持机动飞行的瞬态功率需求。初始电机的尺寸确定与设计工作基于表1飞行动力学仿真获取的机械参数(如转速、扭矩及功率)展开。按照飞行器早期设计的常规做法,为确保eVTOL在湍流空气环境及故障场景下机动飞行时的瞬态功率需求,设计阶段采用了20%的功率裕度。
电力推进系统的设计、建模与仿真采用Gamma Technologies公司的GT-SUITE软件平台实现。该软件包含专用于根据飞机设计要求确定电机尺寸的工具。最基础的设计参数集包括电机输出功率、电池直流电压及额定电机转速。为提高电机设计方案的合理性,还可提供包括最大电流和电机控制算法信息在内的可选设计参数。
图7展示了所采用的电推进系统设计工作流程示意图。初始电机设计通过尺寸确定工具获得,其输入参数包括:初始任务性能评估所需的扭矩与转速,以及基于领域先验经验确定的电机电压与电流要求。逆变器需将电池放电功率转换为电动机所需的交流电。电池则须支持逆变器的电压与电流需求,并储存足够能量以确保完成设计任务。
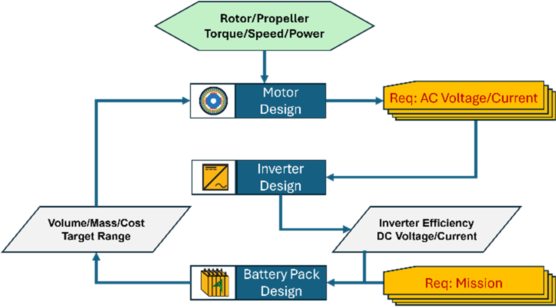
图7 动力系统设计工作流程
在初始动力系统设计中,逆变器被设定为100%的理想效率。现代功率转换器在理想工况下的实际效率可达95-99%。因此,在后期设计阶段进行详细功率转换器设计时计入安全裕度,可论证早期设计阶段采用理想逆变器假设的合理性。电池组的规格确定需确保即使在低电量状态下仍能提供所需功率,同时需综合考虑逆变器的实际效率。
通过在设计任务最严苛的稳态运行条件下对单个电池单元、功率转换器及电动机进行联合测试,完成了对初始动力系统的评估。随后,将该初始电力推进系统与飞行动力学模型在湍流尾流环境中进行耦合仿真验证。基于耦合模型的机动飞行仿真揭示了瞬态效应(如传动系统惯性及与飞行控制的交互作用),这些效应对电力推进系统部件提出了额外需求,从而使得优化工作不仅能够逐一对单个电力推进部件进行调整,更能实现对整个电力推进系统的协同优化。
电池初始设计
基于初始电机设计,建立了电池组的初步模型。适当规格的电池组必须能够在给定的扭矩与转速要求下为电动机提供充足功率,同时具备足够的容量以维持整个设计任务期间(直至下一次充电前)的电力供应。因此,早期电池设计的关键因素在于电芯化学体系与电池组尺寸。参考文献[1]所述的电池设计方案满足驱动九台电动机的功率需求。其次,可通过增加电池组中并联电芯的数量来调节电池组的容量。
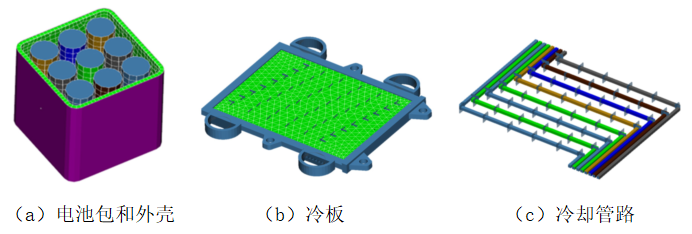
图8 电池组及冷却回路部件示意图
电池组的设计采用参考文献[1]所述的电化学电池仿真工具完成。电池活性材料选用锂镍锰钴氧化物(NCM811),并搭配石墨正极材料。此类电芯化学体系以提供高能量密度著称。由7600个独立电芯组成的电池组总重约为859公斤(1894磅)。电池组规格经过调整,确保能提供驱动eVTOL构型九台电动机所需的电压与功率,并已考量逆变器效率的影响。
电池热管理模型基于电池组的电化学模型构建。此类三维热电池模型的示意图见图8(a)。通过在三维模型中添加冷却板与冷却通道等散热部件,可进一步扩展电池组的热管理模型。图8(b)与图8(c)展示了基于参考文献[1]电池组模型附加的冷却板与冷却通道结构。
电池组自身的热模型以及冷却板与管道的热模型,均被转换并导出为一维热质模型。这使得电池组热模型能够直接集成到包含电力推进系统与飞行动力学模型的耦合系统模型中。通过这种方式,电化学电池模型计算出的热负荷可直接加载到热模型上,用于计算电池包内部的瞬态温度分布。电池温度随后可反馈至电化学模型,以反映电化学仿真中的温度依赖特性。
2.5 动力系统设计改进
在完成初始组件布局后,我们对电动动力系统进行了电池容量与重量评估。为提升电池包的有效容量并延长电动垂直起降飞行器(eVTOL)的续航里程,增加了并联电芯的数量,但这同时也导致推进系统重量增加。为此,我们对电机设计进行了改进以减轻系统重量。使用GT-SUITE进行了电磁分析,以研究定子铁芯材料内部的磁场线分布。结果表明,减小定子铁芯厚度不会导致性能显著下降。
通过进行耦合仿真,我们能够快速对电动推进系统各组件进行初步的性能与重量评估优化。后续可采用单目标(例如针对eVTOL航程优化动力系统)或多目标(例如同时考虑部件/系统重量)的方式进一步优化动力系统。
电机设计改进
该电机设计采用了参考文献1中所述的GT-SUITE二维电磁有限元分析(FEA)工具。在参考文献1中,升力旋翼的电机最初被设计为径向磁通内置永磁(IPM)电机。此电机设计已替换为轴向磁通电机(AFM)设计。图9展示了轴向磁通电机的装配示意图。
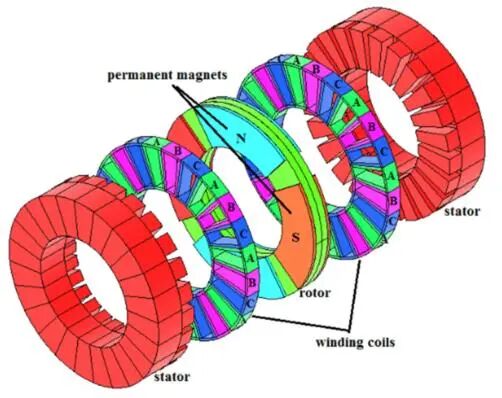
图9 轴向磁通电机原理图
尽管轴向磁通电机同样利用永磁体与定子绕组产生的旋转磁场相互作用,但其能够在保持紧凑设计的同时产生高扭矩。因此,轴向磁通电机主要应用于部件重量对系统设计至关重要的场景。由于轴向磁通电机的几何结构和磁通方向特性,其电磁仿真本质上是一个三维问题。然而,为利用参考文献1中所述计算量更小的二维有限元分析(FEA),可通过线性电机几何结构(见图10)对三维电机几何结构进行近似模拟。本研究中的轴向磁通电机采用了"双定子单转子"的配置方案。
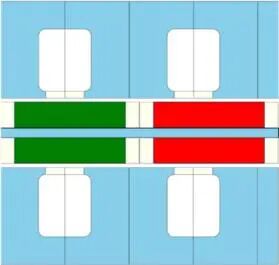
图10 二维直线电机模型剖面图
图10展示了电机的半剖视图:顶部是钢制定子槽,底部转子上一排永磁体分别以绿色和红色标示。基于电磁效应的对称性,将电机模型简化为一半可有效加快仿真速度。表2汇总了该设计的关键特性参数与测量数据。
表2 轴向磁通电机设计参数
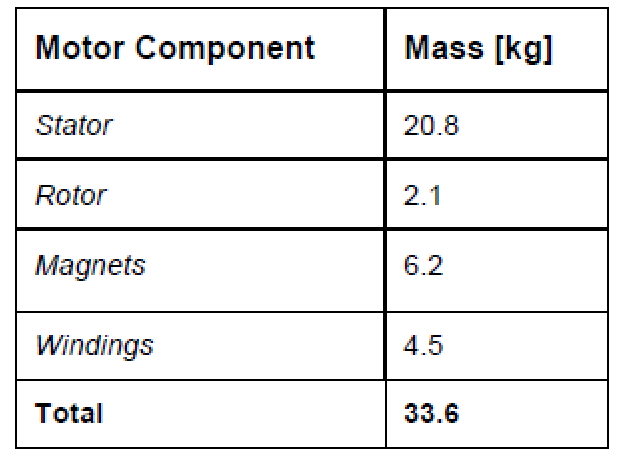
结合二维几何结构、电机长度及材料属性,可计算出电机的重量。表3展示了轴向磁通电机各部件重量估算值,其中应用了0.82的经验修正系数,以反映从线性电机构型转换为轴向磁通构型带来的重量缩减。
表3 电机部件质量估算
电磁有限元分析的主要结果是利用电机的电感和磁通链来构建电机的等效电路模型。该等效电路模型被集成至系统模型中,并与逆变器、电池、转子轴等周边组件实现交互作用。
为驱动推进螺旋桨,设计了一台常规径向磁通电机。基于图10所示的二维线性电机设计,建立了电机热模型,用于研究在耦合仿真过程中热量在不同电机部件间的传递与温度分布情况。因此,根据二维电机几何结构推导出了三维电机模型,如图11所示。
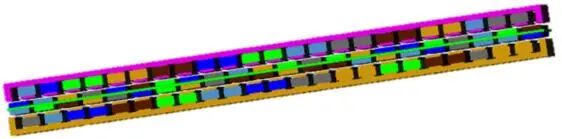
图
11 3D电机热模型基于三维几何结构,我们推导出了一维集总热质量模型。该一维热质量模型将三维几何结构简化为一系列质点、热源和热阻。材料的热导率及部件间的接触面积均根据三维几何结构自动计算得出。通过这种一维简化方法,热模型得以集成到系统模型中,从而能够在耦合仿真运行期间研究电机热模型与电机机电模型之间的相互作用。
逆变器设计改进
逆变器采用基于浏览器的GT-POWERFORGE应用程序进行设计。该应用使用户能够根据电机运行条件(如交流功率、直流电压及三相绕组电流频率)筛选并比较多种逆变器设计方案。该逆变器设计工具支持开展大规模参数化研究,涵盖多种开关技术与控制策略,以确定最优功率转换器设计。同时,该工具还可提供部件成本与重量的估算数据。
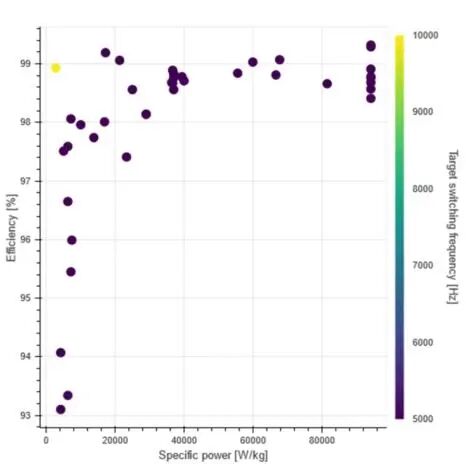
图12 逆变器效率随比功率变化的关系
图12展示了基于GT-POWERFORGE的逆变器效率随比功率变化的函数关系。图中显示,低比功率逆变器的效率较低。初始选择的逆变器模型质量约为12千克,体积为0.00662立方米,整体效率为97.5%。随后,为描述逆变器效率随电气工况变化的特性,导出了该功率转换器的损耗Map。
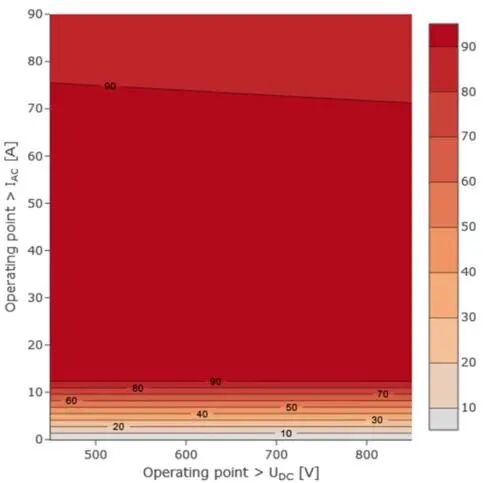
图13 逆变器功率损耗Map
效率和功率损耗Map是逆变器正弦输出电流的交流电压、直流电压和功率的函数。虽然图13展示了单个工作点的逆变器功率损耗,但在耦合系统模型中已实现包含所有相关变量的完整功率损耗分布图集。
2.6 湍流气流模型
在屋顶垂直起降场运行是商业案例和衍生设计任务中的核心要求。因此,必须在飞机设计早期就考虑这一严苛的运行环境,以便合理确定动力系统组件的规格并制定飞行控制系统需求。在进行大量测试与实验之前,作者通过湍流尾流中的着陆与悬停保持仿真来深入探索飞机设计空间。
FLIGHTLAB提供了一个建模模板,可在舰船甲板或建筑屋顶等着陆点纳入统计尾流模型(参见参考文献8至11)。在参考文献11中,一个统计性多维全流场舰船尾流湍流模型已成功集成至FLIGHTLAB,并针对实测与CFD计算的舰船尾流数据功率谱密度进行了验证。在飞行动力学应用的频率范围内,二者相关性表现优异。基于全流场舰船尾流湍流模型,可利用CFD或实测数据构建舰船尾流的多维谱函数。由此获得的谱函数自然反映了整个舰船区域非定常尾流的频率变化特性。
参考文献1的研究采用缩比舰船尾流作为城市尾流数据的替代。本研究针对图14所示建筑进行了非定常模拟计算:采用格子玻尔兹曼方法(LBM)求解器,模拟风速4.5米/秒(15英尺/秒)、垂直于建筑左侧(图14)来流的情况。瞬态计算完成后,通过对体积数据进行采样处理,构建了空间间隔约0.4米的三维查询表。该查询表为美国国家航空航天局(NASA)资助开发的先进空中交通(AAM)应用代表性环境模型(REM)提供了前期评估依据(参考文献13)。
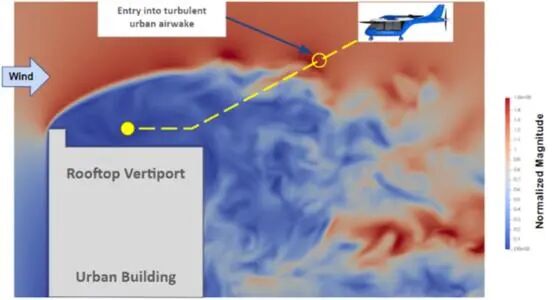
图14 概念性城市尾流结构与eVTOL着陆区
2.7 故障建模与仿真
针对电动垂直起降飞行器在湍流尾流中进场及悬停的机动飞行仿真,能够提供瞬态功率需求,可作为任务性能评估中稳态功率预测的补充数据。
仿真技术具备独特的安全失效模拟能力,可通过设置飞机组件故障来研究故障与功能异常对飞机飞行及任务性能的影响。因此仿真技术可以应用于早期飞机设计阶段,以进一步改进飞机和系统设计需求。
本研究以“升力+巡航”构型eVTOL为例,模拟其在城市尾流中运行时遭遇推进组件故障的情景。通过仿真研究了飞行控制系统能否有效缓解故障影响,并在着陆点上空持续完成悬停任务。通过仿真获得的深入认知,有望在eVTOL飞机设计早期阶段为系统优化提供依据,从而以较低成本实现设计调整。
本次设计研究考虑了单个升力旋翼失效的情况。该分析结果为升力旋翼电机及其相关硬件的规格确定提供了额外依据。由于早期设计阶段故障模式与恢复策略尚未完全成熟,仿真中对多旋翼构型采用了保守方案:模拟了翼前缘外侧升力旋翼(见图2)中驱动1号旋翼的单台电机因过热导致扭矩受限的故障。故障缓解策略为对对称位置旋翼(即机翼另一侧的对应旋翼)进行等比例功率削减。8号旋翼即为位于机翼后缘外侧对称位置的等效升力旋翼。需注意的是,1号与8号旋翼采用反向旋转设计,这有助于在故障期间保持扭矩平衡及飞行器偏航控制。仿真初始阶段,首先在所有旋翼正常工作时进行悬停配平,随后将单个旋翼功率限制在50%。结果显示,该故障导致其余升力螺旋桨所需的稳态悬停功率增加了20%。
随后,在湍流的屋顶尾流中模拟了一段约25秒的进场至悬停轨迹。该城市空中交通湍流尾流基于10节(0度方位角)稳定风况建立。图15展示了进场机动过程中1号和8号旋翼的功率时序变化。在零时刻的配平前飞爬升状态下,由于前飞条件及飞机纵向重心位置影响,前后升力旋翼的功率与推力设定存在细微差异。仿真模型在约13秒模拟时间后穿越屋顶轮廓线。随后控制器降低前飞速度以进入悬停定位点。
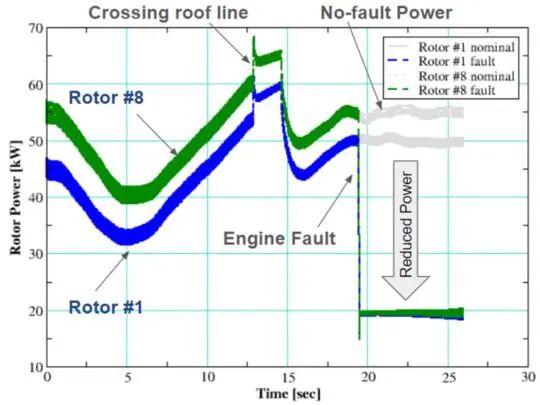
图15 湍流尾流中有/无旋翼故障时短距进场与悬停保持阶段的旋翼功率时序图
Rotor#1故障发生在约19秒时,旋翼功率骤降40%,如图15所示。控制系统立即降低Rotor#8的功率以缓解推力与扭矩失衡。在故障场景下,两台升力旋翼均以约20千瓦的限值功率持续运行。
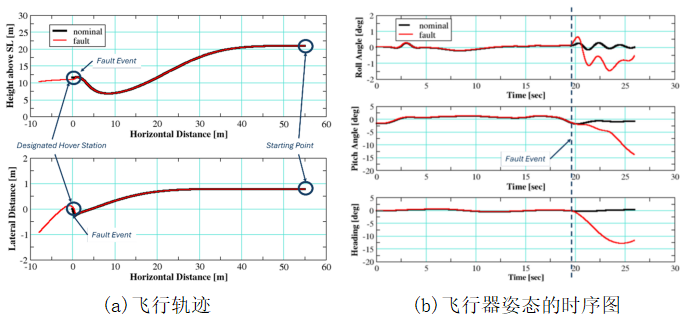
图16 进近轨迹和飞机姿态
图16展示了飞机在湍流尾流区内进行进近和悬停保持机动时的垂直与水平飞行轨迹以及飞行器姿态。需注意,由于旋翼故障,飞行器无法保持悬停位置,并在纵向位置上表现出显著的偏移。这一现象可通过旋翼故障后俯仰姿态的变化来解释:飞行器出现机头向下的俯仰变化,因而向前移动。故障事件后飞行器的航向也产生了约15°的变化。相比之下,飞行器的滚转响应较小。需要说明的是,该飞行控制器尚未配备先进的故障响应逻辑模块。
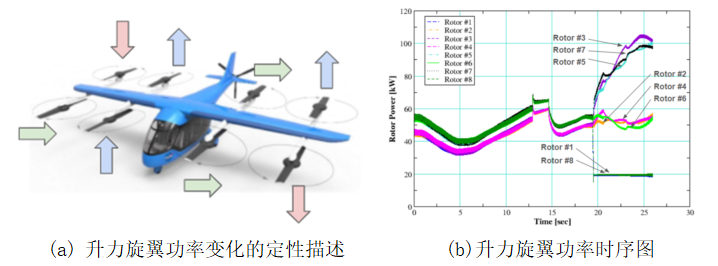
图17 电机故障及湍流尾流区运行中的升力旋翼功率变化
图17显示了在故障事件期间,飞行控制器试图在湍流城市尾流区内保持悬停位置时所有升力旋翼的功率变化。该模拟是使用FLIGHTLAB中的理想推进系统进行的,因为与基于物理的电力推进系统耦合会向飞机响应引入时间延迟,从而放大了其无法保持悬停的问题。图17显示,有三个升力旋翼的功率未出现任何增加,而另外三个升力旋翼的功率需求则增加了一倍。研究发现,该现象是由飞行控制系统为保持航向和俯仰姿态而触发的。图17(a)中的示意图说明了故障事件期间各升力旋翼功率需求的定性变化。向上的箭头表示功率增加,向下的箭头表示功率减少,水平箭头则表示因电机故障而导致功率变化很小的旋翼。
对电机温度的影响
使用理想发动机模型的电机故障模拟结果(见图17b)被输入电机热模型,以分析旋翼故障对电机组件温度的影响。
图18显示了在旋翼#1发生故障且旋翼#8功率约在20秒时降低的情况下,不同电机组件的温度变化。
电机故障对绕组温度的影响最为显著。根据图17所示的旋翼功率需求时序数据,旋翼3、5、7的功率需求较高,这一现象直接反映在电机温度上——对应电机的绕组温度比电机1和8的绕组温度升高约15%。磁铁温度受电机功率差异的影响较为温和,而转子与定子的铁芯温度则几乎未受影响。这种温度上升的非均匀性可通过不同电机组件的功率损耗/发热特性来解释。
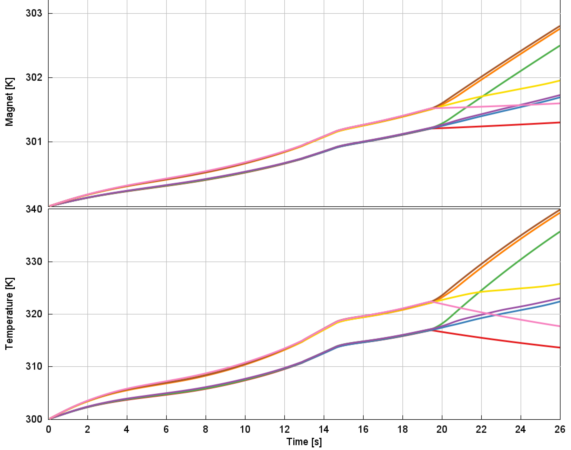
图18 电机故障模拟期间电机组件温度变化
旋翼故障期间电机转速保持不变,而故障旋翼对应电机的扭矩下降,与之平衡的其他旋翼对应电机扭矩则上升。在所采用的电机模型中,电机扭矩与施加电流成比例变化。铜绕组中的欧姆热损耗与相电流的平方成正比,这就是绕组温度对单个电机功率变化敏感的原因。因此可以推断,旋翼#1的热故障事件源于电机绕组。
在针对飞机任务表设定的典型运行条件(即屋顶降落)下,执行旋翼故障案例测试,为下一轮设计迭代提供了重要启示:
(1)升力加巡航构型在低速与悬停状态下偏航控制能力有限,这将在发动机故障情景中对保持飞行器航向构成挑战。
(2)为应对1号旋翼故障而对称降低8号旋翼(镜像对应旋翼)的功率时,会导致俯仰轴控制困难,并引发纵向悬停位置显著漂移。
(3)故障恢复过程中,三台完好的旋翼需要将功率提升100%,这一需求可作为电机、功率电子设备与冷却系统的设计考量依据。
(4)三台升力旋翼的功率需求未受发动机故障影响。未来或许能开发出更优的控制策略来实现旋翼故障后的恢复。
(5)在故障模拟过程中,提升功率输出的电机其绕组温度上升了15%。
(6)飞行控制系统能够在城市空中交通(UAM)湍流尾流中完成进场与悬停保持机动。但在旋翼故障场景下,该系统暴露出若干缺陷,需在后续设计迭代中予以解决。
3. 飞行动力学与电力推进系统耦合仿真
3.1 耦合仿真环境
基于前文所述的飞行动力学与动力总成部件仿真模型,本研究整合构建了统一的耦合仿真模型(如图19所示)。该模型在GT-SUITE平台中搭建,其耦合机制具体表现为:飞行动力学模型(FDM)向电推进系统输出旋翼转速指令作为电机控制值,电推进系统则通过输出电机轴扭矩驱动FDM中的旋翼并维持其恒定转速。在着陆与悬停保持任务场景中,飞行动力学模型持续提供飞行器状态参数,动力总成模型同步生成电推进系统各部件的实时状态数据。
基于FLIGHTLAB飞行动力学模型生成的运行时模型被封装为功能样机单元(FMU)。该单元作为标准化仿真模型容器,同时包含模型描述与仿真所需的编译二进制代码(运行时模型),严格遵循功能样机接口(FMI)标准,确保其在不同仿真环境中的兼容性。FMU可在支持FMI标准的仿真环境中直接集成使用,为模型集成与仿真提供了灵活、标准化的解决方案,有效提升了基于模型的设计与分析工作中的协同效率与执行效能。本研究中,FLIGHTLAB FMU已成功集成于运行在标准微软Windows桌面系统的MATLAB/Simulink及GT-SUITE仿真平台。
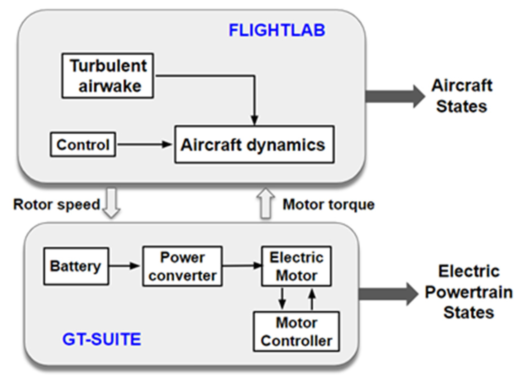
图19 FLIGHTLAB与GT-SUITE耦合仿真环境示意图(参考文献1)
电机轴的力学模型作为飞行动力学模型与动力总成模型之间的接口。在执行飞行任务时,飞行动力学模型根据螺旋桨转速和桨叶总距角计算出负载扭矩。该旋翼负载扭矩作用于基于物理建模的电机(即电机轴)上。推进模型中的电机控制器通过调节电机电流来维持恒定的轴转速,从而在任务模拟过程中既能补偿变化的电机扭矩,又能保持螺旋桨转速稳定。
电机模型接收来自电机控制器的三相电流指令。九台电机均独立控制,并分别连接至九个独立的功率变换器模型。根据交流电流需求,各逆变器会基于其特定工作点的效率向电池组索取相应的功率负载。这种功率需求作用于电池组,导致电池组在电机提取电流时荷电状态下降。同时,电机产生的扭矩被传递至飞行动力学模型,并直接施加于旋翼/螺旋桨轴上。
因此,电机扭矩包含了电机控制延迟、电气部件性能限制以及机械惯性的影响。这实现了两个仿真模型的完全耦合,从而能够在高度精细化的层面研究飞行动力学与动力总成部件之间的相互作用。
除上述电力推进部件外,电机与电池组的热管理模型也被集成到耦合仿真模型中。如图20所示,该耦合仿真模型的最终集成体将飞行动力学FMU、电力推进系统及热管理模型整合在统一仿真架构内。
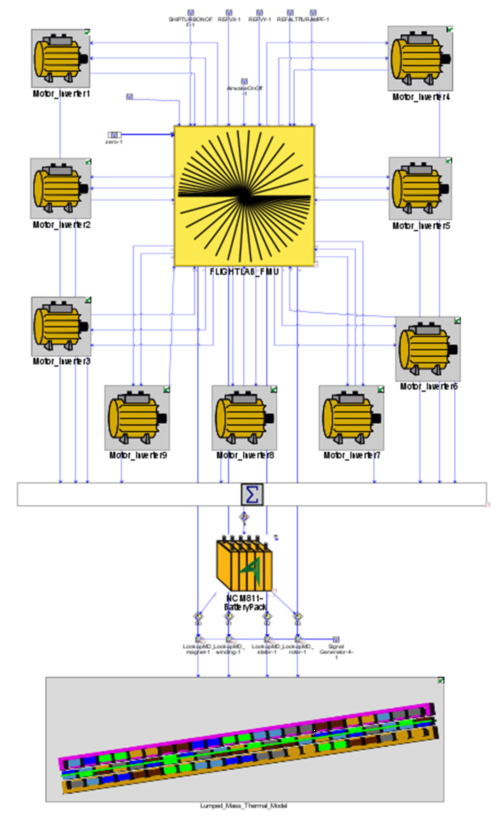
图20 GT-SUITE中的耦合仿真模型
飞行动力学模型、电力推进模型及输入/输出通讯均以0.0018秒的固定时间步长执行。需说明的是,电力推进系统采用动态时间步长算法,但其最大时间步长被限制在0.0018秒以内,以确保耦合仿真的稳定性。
3.2 基准耦合仿真结果
为评估当前飞机设计迭代方案,本研究以悬停保持仿真作为基准模拟案例。任务启动时,飞行动力学模型已在10节恒定顶风条件下完成配平,并保持用户设定的着陆点上空悬停高度。在耦合仿真中,为初始化电力推进系统并执行悬停保持任务单元前,首先冻结飞行动力学模型的机体运动自由度,使电机控制器能在维持恒定轴转速的同时平衡所需电机扭矩。推进系统初始化完成后,解冻飞行动力学模型中的机体运动自由度,并记录电动垂直起降(eVTOL)模型的飞行轨迹。图21展示了悬停保持期间飞行器在水平面(x-y)的位移变化及欧拉角动态响应。
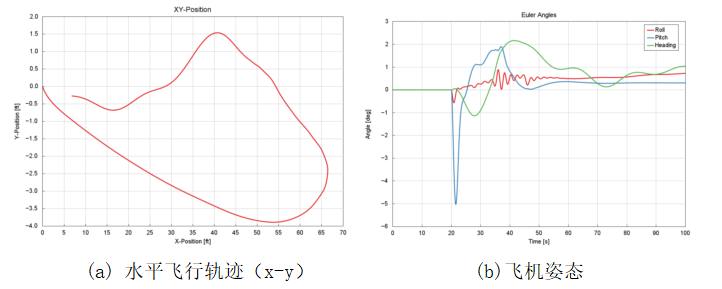
图21 飞机在湍流尾流中盘旋保持时的水平轨迹和姿态
仿真初始阶段的高俯仰角偏差导致纵向位移显著增大,而横向位移相对较小。在欧拉角各项参数均出现初始悬停位置偏差后,飞行控制系统在数秒内使模型恢复稳定,并最终回归目标悬停位置。
电动垂直起降飞行器的角位移变化也可通过电机输出扭矩进行分析。根据图17所示结果,图22展示了1号电机与5号电机的扭矩对比情况。
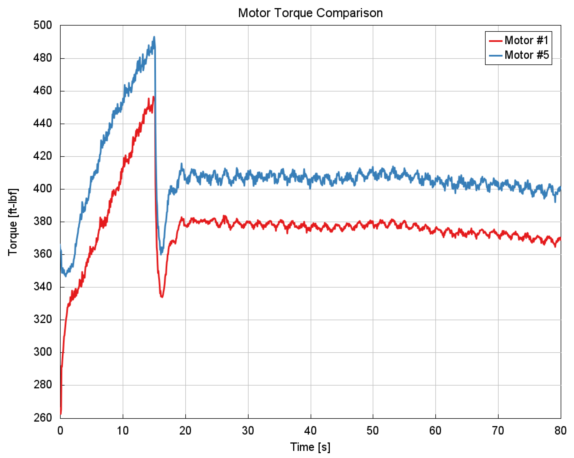
图22 电机扭矩对比
耦合仿真的前20秒用于推进模型初始化,以确保在悬停保持状态下释放耦合仿真的机体自由度前,电机控制系统已达到稳定。图22显示两台电机以相同转速运行。由于飞行控制系统设定的总桨距存在差异,5号电机比1号电机产生更大扭矩。因此在图21中,20秒(模型释放)后出现的初始俯仰姿态偏移,正是由前后升力旋翼推力差异所导致。
电机运行期间,各电机部件会以热能形式产生功率损耗。通过电磁有限元分析可计算电机内部转子、定子、磁体及绕组的损耗值。这些损耗取决于电机的转速与扭矩,并作用于电机的热质网络模型,从而实现对电机模型内部热传导与温度分布的分析。图23展示了悬停保持任务单元仿真过程中各电机部件的温度变化曲线。
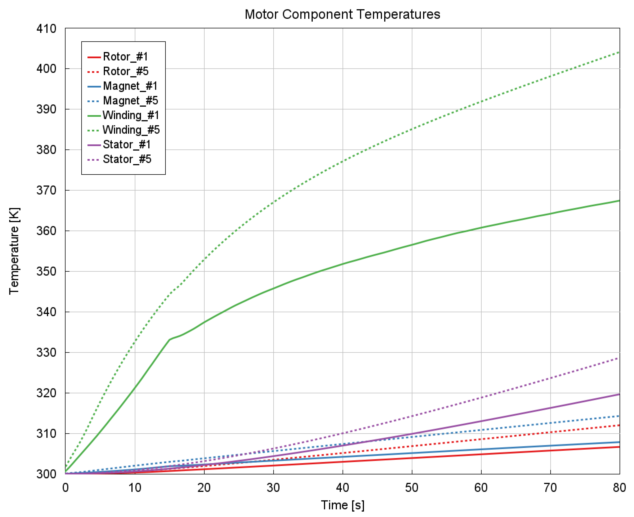
图23 悬停保持期间电机部件的温度变化
图23同时绘制了1号与5号电机的数据曲线。磁体与转子温度在悬停保持过程中呈现适度上升,增幅低于10开尔文。电机内部主要热源为铜质绕组,特别是在高扭矩、低转速的运行工况下,铜损预计将成为电机内部主导性热源。绕组产生的大量热量使定子铁芯材料温度升高,该现象在图23中得以体现。因此,当5号电机在悬停保持任务阶段输出更大扭矩时,其绕组内部欧姆损耗增加,进而导致绕组温度上升。
4. 下一次设计迭代的任务
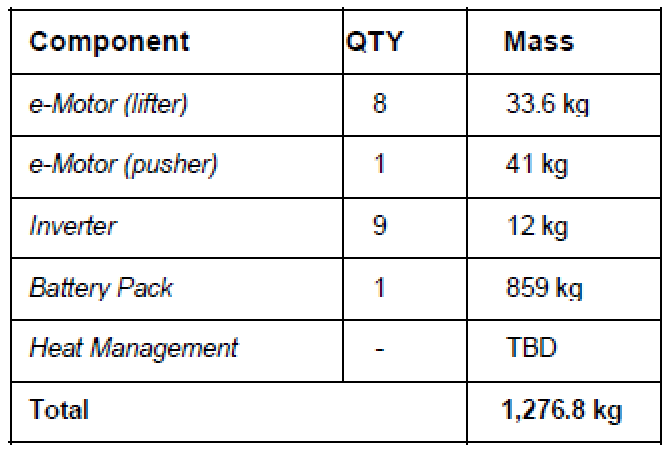
本次研究开展的设计迭代为飞行与推进系统的设计提供了重要见解与需求依据。通过GT-SUITE系统级设计工具获得的当前迭代方案重量估算已汇总至表4物料清单中。需特别指出的是,本轮迭代中初步热管理模型的研究成果,将推动电力推进部件进行必要的精细化设计,从而在下一轮设计迭代中生成热管理系统部件的质量预估数据。
表4 推进系统物料清单
本次设计迭代的研究发现及下一阶段任务可归纳如下:
(1)根据本轮迭代数据更新飞机重量与平衡参数,重新计算有效载荷余量,必要时重新运行任务性能仿真。
(2)基于系统性能优化动力总成部件,包括根据电动垂直起降飞行器的目标航程或湍流尾流中的飞行稳定性需求,优化电机与逆变器设计。
(3)研究电力推进部件的差异化冷却方案(例如喷淋冷却、油冷或不同冷却管路布局),并为冷却部件提供初步质量预估。
(4)在低速控制律及故障检测与缓解逻辑中集成推进螺旋桨功能。
(5)调整飞行控制增益,以提升湍流尾流环境下耦合仿真的运行效果,更精确地保持进场轨迹与悬停位置。
(6)增强悬停及低速状态下的偏航控制能力。
(7)优化电池规格与充电策略,探索潜在的系统减重可能。
(8)完善推进与飞行控制系统中针对单电机故障的检测与应对策略,通过飞行控制优化避免剩余正常电机出现过载。
(9)扩展飞行动力学模型,增加升力旋翼启停功能,为垂直起降与固定翼模式间的过渡飞行仿真做准备。
(10)开展耦合系统的参数化研究,针对不同风速、风向及湍流强度条件进行进场与悬停保持仿真分析。
5. 总结与结论
本研究通过开展单次概念飞行器设计迭代,探索了运用精细化的飞行动力学与电力推进仿真技术,为概念性“升力+巡航”电动垂直起降构型推导飞行器及系统需求的方法。首先基于初始飞行动力学模型预估了设计任务性能,以此确定电力推进系统主要部件的规格参数。为扩展部件规格设计的信息维度,并通过引入机动功率需求来推导推进与飞行控制系统的设计要求,研究进一步构建了飞入城市空气尾流场的着陆进场轨迹模型。
通过在湍流城市空气尾流场中模拟悬停保持任务阶段的单电机故障,研究初步掌握了剩余正常升力旋翼所需提供的应急功率。该数据为推进系统的需求细化提供了依据,因其直接关联电池功率输出与热负荷生成。
研究通过构建飞行动力学与精细化电力推进系统的耦合仿真模型,在城市湍流尾流环境中进行悬停保持模拟。该模型向飞行控制系统施加了真实的时间常数约束,从而揭示出飞行与推进控制逻辑需要改进的环节。精细化推进系统模型为制定推进部件的冷却策略提供了必要的依据。
这种精细化的早期仿真还能为飞机设计提供关键动力部件的初步质量预估。本研究总结了在此轮飞机设计迭代中运用精细化耦合仿真的核心发现,并将其转化为后续设计迭代的任务清单。该研究由此证明了在飞机设计初期应用耦合仿真技术的有效性——它能够为飞机系统设计(特别是飞行控制与电力推进系统)制定关键需求规范,尤其对城市环境下的运行具有重要指导意义。
参考文献
1.Goericke, J., Brenner, F., Lee, Dooyong, Habana, Zoren, “Investigation of eVTOL Operations in Turbulent Airwake using Comprehensive Rotorcraft Analysis and Physics-Based Electric Propulsion System Models,” VFS 6th Decennial Aeromechanics Specialists’ Conference, Santa Clara, CA, USA Feb.6-8, 2024
2.Brenner, F., Goericke, J., Hasbun, M., “Comprehensive Simulation for eVTOL Aircraft-Diagnosing Coupled Airframe-Propulsion Dynamic Instabilities,” 78th Vertical Flight Society Annual Forum, Ft. Worth, TX May 2022
3.Brenner, F., Goericke, J., Hasbun, M., “Comprehensive Simulation with Coupled Airframe- Propulsion Dynamics in Support of eVTOL Design,” 79th Vertical Flight Society Annual Forum, West Palm Beach, FL May 2023
4.Hoff van’t, S.; Lu, L.; Padfield, G.; Podzus, P.; White, M.; Quaranta, G.; “Preliminary Guidelines for a Requirements-Based Approach to Certification by Simulation for Rotorcraft,” 48th European Rotorcraft Forum, Winterthur, Switzerland, 6-8 September 2022
5.Simmons, B. M., Bunning, P. G., and Murphy, P. C., “Full-Envelope Aero-Propulsive Model Identification for Lift+Cruise Aircraft Using Computational Experiments,” https://www.researchgate. net/publication/353539418, August 2021
6.Silva, C. and Johnson, W., “VTOL Urban Air Mobility Concept Vehicles for Technology Development”, 2018 Aviation Technology, Integration, and Operations Conference, AIAA Paper 2018-3847, June 2018, https://doi.org/10.2514/6.2018-3847
7.Mahmoudi A., Rahim N. A. and Hew W. P., “Axial-flux permanent-magnet machine modeling, design, simulation and analysis”, Scientific Research and Essays Vol. 6(12), pp. 2525-2549, 18 June 2011
8.He, C., Lee, D., Zhao, J., Ware, C., “Unified Control and Simulation Tool in Support of Rotorcraft/ Ship Dynamic Interface," AHS 67th Annual Forum, May 2011
9.Xin, H. and He, C., “A Statistical Turbulence Model for Shipboard Rotorcraft Simulations,”Proceedings of 63rd Annual AHS Forum, Virginia Beach, VA, May 2007
10.He, C., Kang H., Carico, D. and Long, K., “Development of a Modeling and Simulation Tool for Rotorcraft/Ship Dynamic Interface Testing”, Proceedings of 58th AHS Annual Forum, June 11-13, 2002, Montreal, Canada
11.He, C., Goericke, J., Lee, D., and Zhao, J., “Simulation Development in Support of Investigation of Handling Qualities Specification Requirements for Maritime Rotorcraft,” American Helicopter Society Specialists' Conference on Aeromechanics, San Francisco, CA, 23-25 January 2008
12.Polsky, S. A. and Bruner, C. W. S., “Time Accurate Computational Simulation of an LHA Ship Airwake,” AIAA-2000-4126, 18th AIAA Applied Aerodynamics Conference, Denver, CO, Aug. 2000
13.Smith, M. J., Crawford, A., and Carozza, K., “Development of an Operational Analysis Tool for Urban Air Mobility,” Proceedings of the 79th Vertical Flight Society Annual Forum, West Palm Beach, FL, May 16--18, 2023, 10.4050/F-0079-2023-18135
文章来源:GT北美用户大会

 B站账号
B站账号

 知乎账号
知乎账号

 微信账号
微信账号
