自动驾驶(AD)能力的重大进展即将到来。然而,目前大多数车辆仅配备了基础的高级驾驶辅助系统(ADAS)功能,只有少数具备自动驾驶(AD)能力。我们通常提到的汽车工程师学会(SAE)第0级、第1级和第2级驾驶自动化系统,在这些级别上,驾驶员仍然对任何车辆干预负责,驾驶员有权决定是否认为车辆的干预不适当。
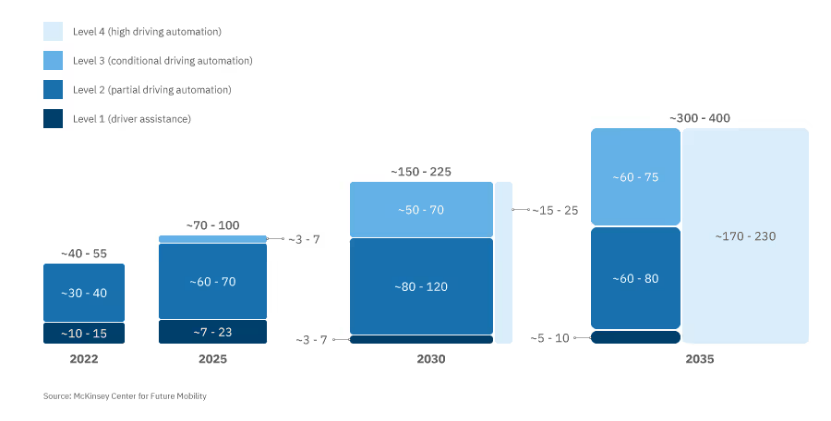
目前,只有少数车辆达到了第3级自动化,在该级别下,车辆可以独立行驶。然而,即使在这一层级下,如果车辆遇到无法处理的情况,驾驶员仍需准备接管。根据麦肯锡的报告,消费者希望使用自动驾驶功能,并愿意为其支付费用。预计这一趋势将为汽车行业创造更多价值。基于消费者对自动驾驶功能的兴趣以及目前市场上可用的商业解决方案,到2035年,ADAS和AD有可能在乘用车市场产生3000亿至4000亿美元的额外价值。
为了成功推动ADAS和自动驾驶系统(AV)达到SAE第3级和第4级,原始设备制造商(OEM)需要采纳一种专注于基于仿真的开发过程的新方法。ADAS功能的数量和复杂性的增加需要进行广泛的测试——数亿公里——以验证性能。这使得物理测试在财务上变得不可行。那么,我们如何才能交付在各种场景下都能可靠且合规的自动驾驶系统呢?
在ESTECO,我们提出了一种白盒验证系统,利用统计工具对道路测试数据进行后处理,识别出对安全案例定义至关重要的条件。我们最近在欧洲的“操作安全系统(OSS.5)”大会上展示了我们在ADAS/自动驾驶验证方面的方法,该会议是自动化车辆操作、功能和系统安全领域的顶级活动。通过我们的软件解决方案ESTECO VOLTA和modeFRONTIER,我们旨在简化ADAS/自动驾驶在不同传感器、算法、执行和场景下的性能研究。这为推动汽车行业的自动化提供了一个强有力的解决方案,能够精准定位关键测试案例并评估功能风险。

来自OSS.5欧洲大会的见解
今年,超过150位来自安全、保障、验证和验证领域的顶级行业专家汇聚一堂,交流知识和见解。ESTECO主办了一场主题研讨会,讨论了仿真技术在自动驾驶系统开发中的必要性。来自大陆集团、弗劳恩霍夫研究所、斯堪尼亚、斯特兰蒂斯、TNO和Zeeker汽车欧洲的代表分享了他们在加速ADAS/自动驾驶测试方面的挑战、想法和解决方案。

通过仿真和人工智能定义安全案例
仿真可以生成无限多的测试场景,但并非所有场景都是相关的或现实的。挑战在于确保生成的场景是可行的测试案例,即使它们发生的概率较低。通过一个全面的场景数据库,相关的AI/机器学习算法可以智能地对测试案例进行采样,并识别缺乏足够数据的极端案例。认证AI是一个重要且复杂的话题,因为它涉及使用基于机器学习的模型为特定查询提供结果。挑战在于建立一个可接受的信心水平,并解释如何达成这个信心水平。仿真应作为自动驾驶车辆验证和确认(V&V)的辅助工具,要求公司层面及行业之间的利益相关者进行合作。
将V型开发与CI/CD集成
尽管持续集成和持续交付(CI/CD)流程在软件行业中广泛应用,但传统的V型开发方法通常用于制造业。自动驾驶车辆的开发需要一种混合方法,将这两种方法结合起来,以应对涉及的大量软件功能。
业务流程使人们能够以结构化的方式工作,并在任何时刻跟踪项目进展。通过拥有一个业务流程来捕捉传统的V型开发过程,我们还可以添加另一个业务流程,考虑到所需的软件开发过程(CI/CD),该过程在开发的各个阶段进行干预。根据参与的团队不同,有些团队会认为V型开发是前进的道路,而另一些(软件开发团队)可能认为CI/CD是管理车辆开发的唯一方式。现实情况可能介于两者之间。
极端案例与风险接受
一个主要的挑战对风险进行计算并集成到开发过程中。风险结合了暴露度(事件发生的概率)和严重性(影响或伤害的程度)。通过将风险作为仿真过程中的目标,我们可以进行优化,使风险最大化,以识别关键条件。这种评估有助于判断关键场景的风险是否可接受(风险低于人类驾驶员能够容忍的程度),或者是否需要调整算法和/或传感器。但是,这是否足够?与监管机构的合作对于定义可接受的信心水平以获得认证至关重要。
安全案例的仿真模型
许多软件供应商在仿真中推广基于物理的传感器,但它们真的有必要吗?对高细节的需求是一个有争议的问题。仿真永远无法完全复制现实世界的场景,但它可以识别极端案例和关键条件,如电学串扰(blooming)现象或幽灵物体生成。仿真模型需要调整和校准,以便有效地代表测试。将现实世界转化为仿真环境是复杂的,因为它涉及到模拟车辆行为和传感器反应。不同的仿真模型是为了不同的目的而构建的,因此需要不同的精度水平。剩下的问题是,这些精度水平到底需要多详细?一种可能的路径是借鉴《预期功能安全性》 (SOTIF) 方法。在这种背景下,工程师可以定义仿真在哪些情况下会产生错误的结果。目标是确定仿真模型的最小要求,以确保其具有意义,同时保持适当的保真度水平。
ESTECO 技术如何
应对关键的ADAS/AD验模挑战
验证自动驾驶(AD)车辆涉及到无穷多的潜在载荷情况,因为这些车辆在不同的环境中运行——从繁忙的城市街道到开阔的高速公路,再到各种不同的天气条件。在物理道路测试中几乎不可能涵盖所有这些因素。考虑到车辆动力学、传感器和控制系统的自动驾驶仿真可以帮助生成逼真的驾驶场景。但这些仿真必须现实,并且在某种程度上要与真实的驾驶条件相关联。在ESTECO,我们认为单独解决ADAS/AD验模的挑战是不现实的。
仿真和建模在ADAS/AD算法的验证中起着重要作用。通过使用复杂的虚拟环境和数学模型,仿真可以在各种极端案例和场景中对ADAS/AD算法进行严格的测试和验证,这些场景在物理测试中可能很难复制。我们目前正在与TNO合作开展数据挖掘活动,创建一个场景数据库。这仅仅是开始。我们知道,在一个定义好的操作设计领域(ODD)中,证明系统在所有可能场景下的能力是不可行的。因此,重要的是要有一种方法来计算该功能符合要求的置信度(风险)。为了计算置信度(风险),我们在定义的ODD范围内采样了场景数据库,并自动化了仿真过程,涉及所有需要的仿真软件包,以确保自动驾驶场景的全面考虑。
通过我们的数字工程软件解决方案——ESTECO VOLTA和modeFRONTIER,我们旨在通过基于场景的设计验证和优化方法,帮助ADAS/AD工程师简化验证过程。我们的白盒验证系统不依赖于任何特定的软件包或制造商。它利用统计工具对道路测试数据进行后处理,并识别出安全案例定义中的关键条件。
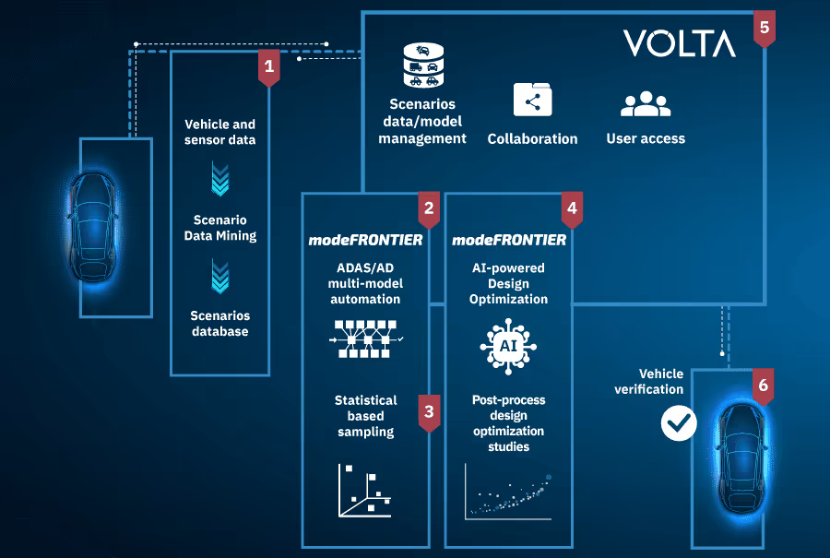
以下是我们基于场景的验证计划如何规范化验证过程:
1.数据收集:收集车辆数据,进行数据挖掘并创建场景数据库。
2.自动化:在modeFRONTIER的过程自动化和设计优化仿真工作流中,自动化ADAS/AD功能与车辆动力学传感器和算法。
3.采样:通过从初始场景数据库中采样,探索设计空间,了解最相关的参数及其限制。
4.场景生成:利用AI/ML算法生成大量场景,识别最关键的测试用例。
5.数据共享:使用ESTECO VOLTA数字工程平台存储并在团队间共享生成的数据,进行SPDM(系统级产品数据管理)和MDO(多学科优化)。
6.安全案例开发:构建安全案例并定义ADAS/AD功能的限制。
自动驾驶是未来的发展方向,但验证这些复杂系统仍然是一个重大挑战。ESTECO的基于场景的验证计划是一种便携式白盒方法,无论涉及到哪个制造商或系统,都能简化ADAS/AD验证过程。

 B站账号
B站账号

 知乎账号
知乎账号

 微信账号
微信账号

