摘要
当下,电动及混合动力电动飞机的需求呈持续增长态势,在城市空中交通(UAM)领域尤为显著,这有力推动了飞机动力系统设计的创新进程。串联混合动力倾转旋翼系统是一种极具发展前景的配置,它巧妙融合了混合动力电动推进系统的动力性与高效性,以及倾转旋翼技术具备的多用途飞行动力学特性。本文将为大家分享在设计与开发初期,针对串联混合动力倾转旋翼系统开展的仿真与优化工作。
简介
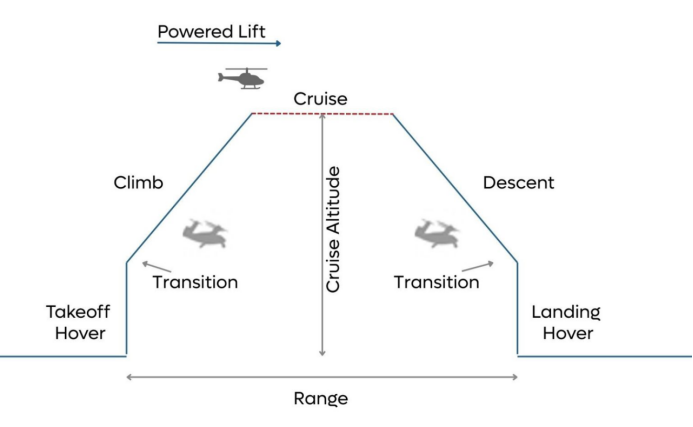
倾转旋翼飞机的特点是其旋翼可在垂直与水平方向之间转换,从而兼具垂直起降(VTOL)能力和高效的前向飞行性能。通过集成串联混合动力系统(即内燃机(ICE)驱动发电机,为驱动旋翼的电机提供电力),这样能够将两者的优势结合:既具备传统燃油发动机的续航能力,又拥有电力推进系统的灵活性与可控性。


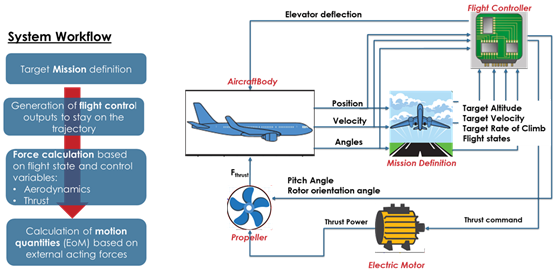
串联混合动力倾转旋翼系统的部件组成
飞机机体模块接收控制输入并评估动态响应。这涉及以下内容:
力的计算:由空气动力学和推力贡献推导而来(包括垂直起降(VTOL)模式下的垂直升力和巡航时的前向推力)
运动方程(EOM):基于净外力和力矩,更新速度、角速率和位置等运动参数
该模块体现了飞机的 3 自由度(3DOF)刚体物理特性。

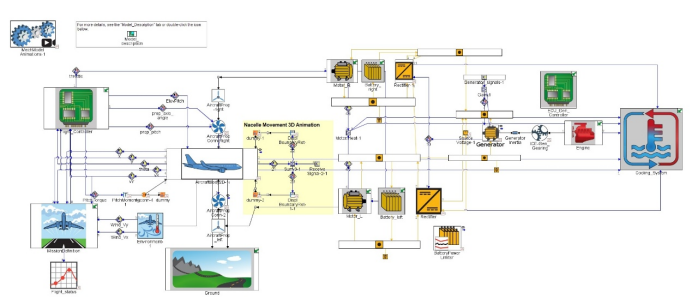
在 GT-SUITE 中开发的串联混合动力倾转旋翼飞机的系统级示例模型。该模型将电推进组件、3 自由度飞行动力学、短舱驱动系统和能量管理系统集成到一个统一的仿真环境中。
该倾转旋翼模型被构建为可执行完整的垂直起降(VTOL)任务,从垂直起飞到巡航再到着陆,同时能够对不同运行模式下的动力系统行为和飞行控制响应进行详细分析。
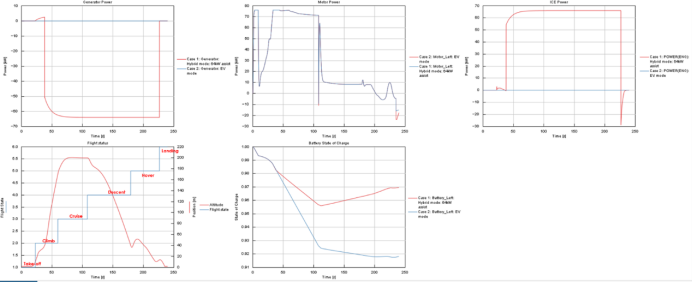
动力配置:在爬升 / 巡航阶段和下降 / 悬停阶段,电动机由 64 千瓦的混合动力辅助系统提供支持,可在 ECU 发电机控制器中相应修改。
该配置展示了混合动力支持如何在峰值功率需求时提升性能并延长运行续航时间

关键指标与结果
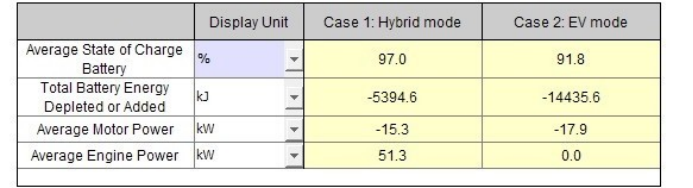
仿真结果包括:

总结
本文基于GT-SUITE 多物理场仿真平台,针对串联混动倾转旋翼机系统,在设计与开发初期阶段开展仿真优化工作。通过该平台构建集成动力、飞行控制等核心子系统的多系统模型,模拟完整垂直起降任务流程,重点对比纯电动、串联混动等不同模式下的性能表现与能耗差异。仿真过程中,重点跟踪电池荷电状态、功率需求等关键指标,展示了动力配置与飞行控制对性能、航程及能耗的影响,为混合动力电动旋翼机能量管理策略优化奠定基础。
文章来源:Gamma官网,翻译整理:徐志成


 B站账号
B站账号

 知乎账号
知乎账号

 微信账号
微信账号

